Harvard University Engineers 3D Print Soft Robots That Bend on Command
Soft robots—made from flexible, biocompatible materials—are increasingly in demand across healthcare, manufacturing, and assistive technology. But designing them to bend, twist, and move in predictable ways has long required complex molds, multi-step casting, and painstaking assembly.
Researchers at Harvard University have now demonstrated a new way forward: directly 3D printing soft robotic structures with built-in, programmable shape-morphing capabilities.
Published in Advanced Materials, the study describes a fabrication method that prints long, flexible filaments embedded with precisely positioned hollow channels. When these channels are filled with air, the structure bends and deforms in predetermined directions—no molds required.
Rotational Multimaterial 3D Printing
The advance was led by graduate student Jackson Wilt and former postdoctoral researcher Natalie Larson in the lab of Jennifer Lewis, Hansjorg Wyss Professor of Biologically Inspired Engineering at Harvard’s John A. Paulson School of Engineering and Applied Sciences (SEAS).
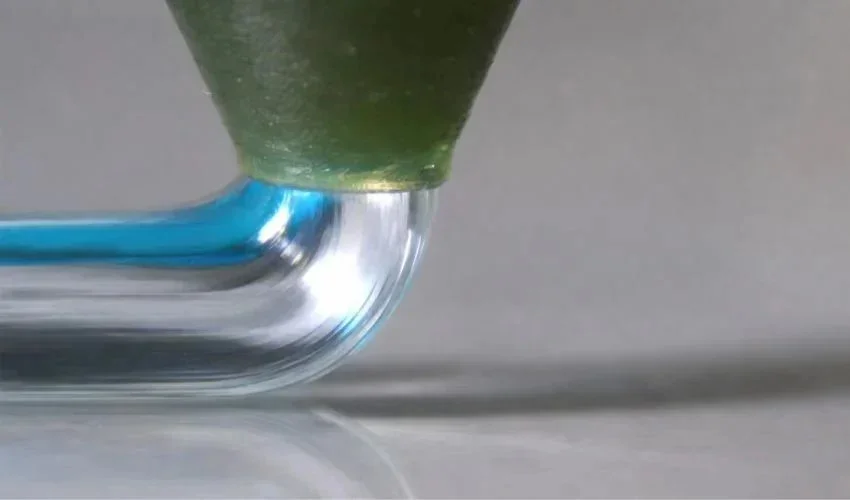
At the heart of the breakthrough is a technique developed in the Lewis lab called rotational multimaterial 3D printing. Unlike conventional 3D printing systems that extrude a single material at a time, this method allows two materials to be printed simultaneously from a single rotating nozzle.
As the nozzle rotates and reorients, it deposits materials in programmable patterns. By controlling rotation speed, nozzle design, and material flow rate, the researchers precisely defined the orientation, size, and geometry of internal channels.
The team printed filaments with:
A polyurethane outer shell for flexibility and strength
An internal channel made from a removable poloxamer gel (a polymer commonly used in hair products)
After printing, the gel-like inner material was washed away, leaving hollow channels inside a solid, flexible tube.
When pressurized with air, those channels cause the structure to bend in specific, pre-programmed directions.
From Simple Fabrication to Complex Motion
Traditional soft robotics often requires casting silicone into molds, layering pneumatic channels, and sealing components together—steps that can be slow and difficult to customize.
This new approach eliminates molds entirely.
“We print the structures, program them rapidly, and are able to quickly customize actuation,” Wilt explained.
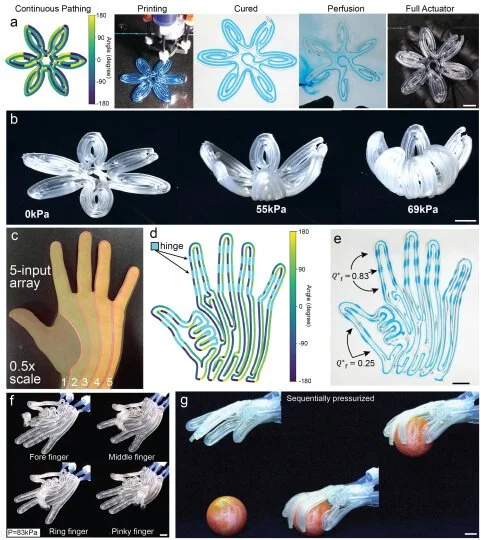
To demonstrate the technique, the team printed:
A spiral flower pattern created in one continuous, maze-like path
A five-digit soft handle complete with articulated “knuckles” that bend when inflated
The results show how complex motion can emerge from carefully programmed internal geometry—without post-processing assembly.
Why It Matters
The ability to directly print soft robots with embedded, programmable actuation opens new possibilities across multiple industries:
Surgical robotics that require gentle, adaptable interaction with tissue
Assistive devices that conform comfortably to the human body
Manufacturing grippers capable of handling delicate or irregular objects
Bio-inspired systems that mimic muscles and plant-like motion
By integrating actuation into the print process itself, the research moves soft robotics closer to rapid, customizable manufacturing at scale.
In short, instead of designing robots and then figuring out how to make them move, engineers can now design motion directly into the material.
For industries looking toward more adaptive, human-friendly machines, that shift could be transformative.