X-Humanoid Launches Embodied Tien Kung 3.0
The race to build commercially viable humanoid robots continues to accelerate, and China’s ecosystem is increasingly positioning itself around openness, interoperability, and embodied intelligence as key differentiators. The Beijing Innovation Center of Humanoid Robotics (X-Humanoid) has officially unveiled its latest platform, Embodied Tien Kung 3.0 — a full-size humanoid robot designed to combine advanced physical capability with an open development ecosystem.
Powered by X-Humanoid’s proprietary Wise KaiWu general-purpose embodied AI platform, the new system introduces upgrades in balance, motion control, and autonomous operation while aiming to lower technical barriers for developers and system integrators.
A Platform Focused on Openness and Deployment
Rather than positioning the robot solely as a research demonstrator, X-Humanoid is emphasizing usability and scalability. According to the company, one of the biggest challenges facing the humanoid robotics sector today is fragmentation — closed hardware interfaces and incompatible software ecosystems that slow development and increase costs.
Embodied Tien Kung 3.0 attempts to address these barriers through open interfaces and standardized integration pathways.
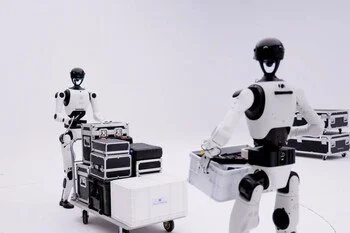
On the hardware side, the robot includes multiple expansion interfaces that allow rapid integration of tools, sensors, and end-effectors, enabling adaptation across industrial, commercial, and specialized operational environments. On the software side, the Wise KaiWu platform provides documentation, toolchains, and low-code development workflows designed to reduce complexity for application developers.
Compatibility with widely adopted protocols such as ROS2, MQTT, and TCP/IP further reflects an effort to align humanoid platforms with broader robotics industry standards — a critical step if humanoids are to move beyond experimental deployments.
Embodied Intelligence Meets Physical Capability
Technically, the Embodied Tien Kung 3.0 focuses on combining high-performance hardware with embodied AI architecture. The platform incorporates high-torque integrated joints capable of supporting high-load applications while maintaining stability on uneven terrain or in constrained environments.
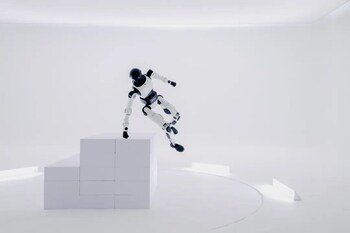
X-Humanoid claims the robot can perform complex, high-dynamic movements — including clearing one-meter obstacles — while maintaining whole-body coordination and precision. Features such as flexible torso motion and extended upper-limb range enable operations in confined or irregular working conditions.
Underlying these capabilities is the Wise KaiWu embodied intelligence framework, which establishes a continuous perception–decision–execution loop. The system integrates world models, vision-language models (VLMs), and vision-language-action (VLA) frameworks to interpret environments, plan actions, and execute tasks autonomously.
The architecture aims to reduce reliance on teleoperation, moving toward multi-robot coordination and collaborative workflows — a trend increasingly visible across the embodied AI landscape.
Open Source as a Strategic Lever
In a move aligned with broader industry trends, X-Humanoid has open-sourced key components of its ecosystem, including motion control frameworks, datasets such as RoboMIND, simulation assets, and training toolchains.
Open ecosystems have become a recurring theme in humanoid robotics development, as companies attempt to build developer communities and accelerate iteration cycles. By lowering technical barriers, X-Humanoid is betting that broader participation from research institutions, startups, and integrators will help drive practical applications faster than proprietary approaches alone.
A Sign of China’s Growing Humanoid Momentum
The launch of Embodied Tien Kung 3.0 highlights how China’s humanoid robotics sector is evolving from isolated prototypes toward standardized platforms aimed at real-world deployment.
While global competition in humanoids often focuses on headline projects and high-profile demonstrations, platforms emphasizing interoperability and developer access could play a significant role in determining which ecosystems ultimately scale.
For the industry, the question is shifting from whether humanoids can move dynamically or perform complex tasks to whether they can be deployed reliably, integrated easily, and adapted across diverse environments.
If platforms like Embodied Tien Kung 3.0 succeed in balancing openness with performance, they may help accelerate the transition of embodied intelligence from research labs into operational reality.