Robots Are Cleaning the Ocean Floor And the Engineering Behind It Is Remarkable
Imagine an autonomous fleet operating in near-zero visibility, under hundreds of meters of seawater, identifying debris by sonar, gripping a 250 kg tire with 4,000 newtons of force, and hauling it to the surface — all without a human hand on the controls.
That's not a concept. That's SeaClear2.0, and it's happening right now.
The Problem Nobody Could Reach
Most ocean cleanup initiatives target surface litter — the floating plastic you can see. But approximately 94% of ocean waste is located on the seafloor, out of sight and out of reach of conventional cleanup efforts. Oceans currently hold an estimated 26 to 66 million tons of waste, predominantly plastic. Left untreated, that plastic degrades into microplastics — particles so small they are nearly impossible to remove, and which now permeate the food chain.
Until recently, the only way to address seafloor litter was to send down divers. Expensive, dangerous, and limited in scale.
SeaClear changed that calculus.
The Robot Stack: How the System Works
For roboticists, the architecture is worth a close look. The system deploys a combination of aerial drones, underwater rovers, autonomous surface ships, and custom-built robotic grippers. Each layer of the stack has a distinct role:
Unmanned Surface Vessel (USV) — Acts as the command hub, deploying and coordinating all sub-systems
Aerial UAV — Maps surface litter hotspots and correlates them with underwater debris patterns
Inspection UUV (Mini Tortuga) — Descends to scan and map the seafloor using sonar and cameras
Collection UUV (Tortuga ROV) — Classifies and retrieves debris using a combined suction-and-gripper manipulator
Autonomous Barge — Acts as a floating transfer station, collecting gathered waste and transporting it ashore
Surface Skimmer Drones — A 10-meter net dragged by two surface drones captures floating litter simultaneously
The onboard AI distinguishes debris from rocks, marine life, and natural features — a non-trivial computer vision challenge in murky, low-contrast underwater environments.
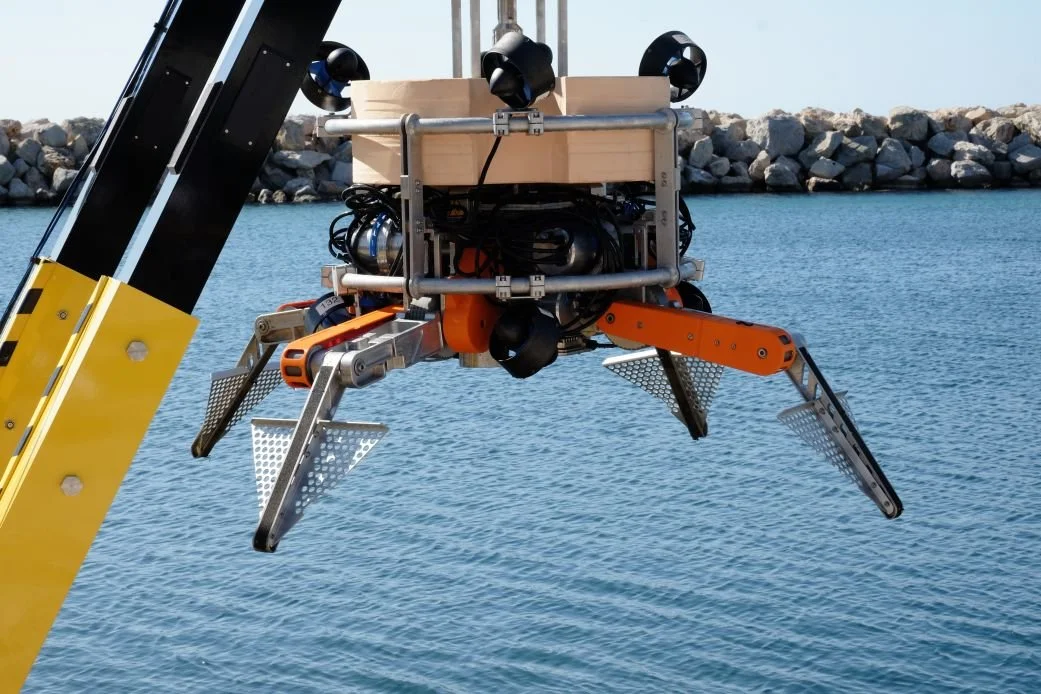
The Gripper: An Engineering Highlight
The collection robot sports four claw-like grippers and can grasp an object with a force of 4,000 newtons, handling objects up to 250 kg. Onboard sensors enable it to gauge how much force to apply without causing damage — preventing plastic buckets from breaking or glass bottles from shattering.
The design drew inspiration from nature. The gripper's honeycomb structure is lightweight yet sturdy, and allows small marine creatures to escape — a deliberate choice to minimize ecological disruption during collection.
Rather than installing onboard batteries, the team tethered the robot — the cable handles both power delivery and high-bandwidth data transmission back to the surface vessel, maximizing operational endurance.
From Hamburg Failure to Marseille Success
Early trials weren't without setbacks. In Hamburg, the team could detect objects in murky water using sonar — but when they found a tire, it exceeded the system's lift capacity. The failure drove a complete redesign of the heavy-lift architecture.
In May 2025, the team held its first live showcase at the Port of Hamburg, successfully detecting, grabbing and lifting a large tire from the port's bottom and transporting it to shore — all automatically. In Marseille, the system cleaned an entire area in under an hour, pulling up tires, fences, car seats, and structural debris.
Scale, Reach, and What's Next
SeaClear2.0 is being tested across varied conditions — from the clear waters of Dubrovnik and Larnaca to the low-visibility environments of Venice and Hamburg. The project has also awarded grants to five public authorities in Norway, Sweden, Greece, Georgia, and Türkiye, expanding its reach. Meanwhile, project partner Subsea Tech secured a contract with a Japanese marine survey company to deliver an uncrewed surface vessel based on the SeaClear2.0 system — the first of its kind in Japan.
The project secured €9 million in Horizon Europe funding and brings together a 13-partner consortium across 9 countries — combining expertise in underwater robotics, AI, marine technology, and recycling.
The system's performance targets are ambitious: an 80% success rate for detecting and classifying underwater litter, a 90% collection success rate, and operation at 70% reduced cost compared to using divers.
Beyond litter, the team is exploring additional applications — harbor security monitoring, detection of illegal underwater activity, and locating unexploded WWII ordnance still resting on European seabeds.

Why This Matters for Robotics
SeaClear2.0 is a showcase of what happens when multi-robot coordination, computer vision, adaptive manipulation, and human-supervised autonomy converge on a real-world problem. This isn't a controlled lab environment — it's harsh, unpredictable, and unstructured. The engineering challenges are significant: variable visibility, dynamic currents, irregular debris shapes, and the physical demands of deep underwater operation.
The project wraps up in late 2026. By then, the team aims to have a system ready to work alongside local port authorities and marine conservation bodies across Europe.
The ocean has been accumulating our waste for generations. The robots are finally starting to clean it up.